MCP协议推出的背后,是Pilot意图重构以解决之前架构带来的代码维护、测试、扩展及稳定性等多方面的问题。在之前的架构中,Pilot内嵌了与K8S的交互逻辑以及其他扩展的注册中心和配置中心的逻辑。这样导致Pilot内部逻辑比较复杂、承担职责不够清晰。同时与各个组件的交互协议也不统一,导致Pilot难以维护这些代码,对于后面的扩展组件接入,也望而却步。在Pilot的重构设计文档中,对于Pilot目前存在的问题是这么总结的[1]:
“
- Pilot is more difficult to test than is necessary. It requires a dependency on K8S Apiserver in order to write more complex unit or simple integration tests.
- We have smeared logic for dealing with the vagaries of K8S CRDs across Pilot, Mixer & Citadel. Common concerns like K8S integration, resource validation and API versioning do not share a common implementation. The proposal to resurrect Galley is primarily motivated by an obvious need to improve our user-facing API experience.
- Consuming the K8S API client in Pilot is a source of bloat and represents a production risk. Moving that risk to Galley while isolating the network control plane from it should be a performance and stability win.
- The contract between Pilot, Kubernetes and other platforms is under-specified. We implicitly consume the totality of the K8S API surface even if we don’t need it.
- Writing extensions to Pilot requires developers to consume our build process and this has proven to be a barrier to adoption for partners. This is analogous to the recent architectural shift in Mixer to use out-of-process adapters for the same reasons.
”
Istio在Pilot重构设计文档中,展示了基于MCP协议的内部组件架构。在这个架构中,Pilot与Envoy还是使用Envoy定义的ADS协议,Pilot与Galley、外部的注册中心、配置中心以及其他的Pilot之间,都是通过MCP协议进行通讯:
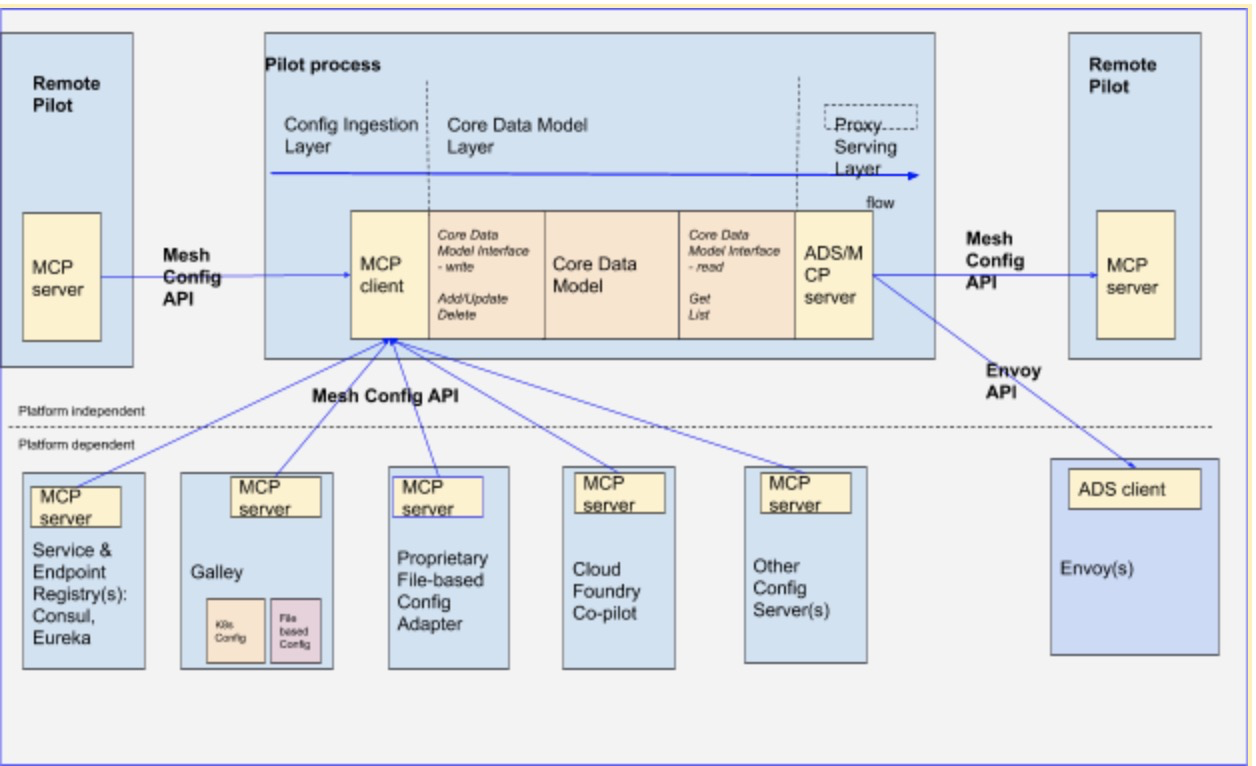
这样的设计比较好的定义了Pilot的职责,就是整个Service Mesh的控制面,但是不感知任何Istio以外的组件,即使是K8S也是如此。所有与外部组件包括注册中心和配置中心的交互逻辑,都移到了Pilot进程以外,通过运行特定的MCP Server来与Pilot进行通讯。Galley的职责,我认为是Pilot中默认的配置来源的MCP Server,目前是实现了与K8S数据的对接。这个文档中还定义了Pilot与Pilot之间的数据访问也是通过MCA(基于MCP协议定义的API),但是文档里没有提供更多的细节,会不会是Pilot未来会支持数据的分片以提高Pilot整体的数据容量?
# 协议定义 看完了Pilot的整体演进架构,我们来看一下MCP协议的设计[2],MCP协议在设计上参考了与Envoy的交互协议xDS。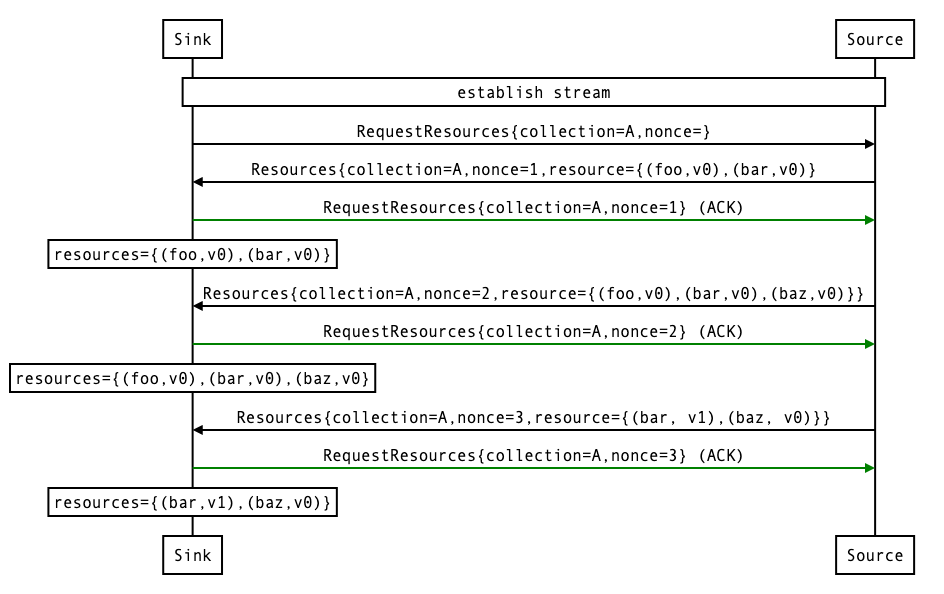
在MCP协议中,定义了两个身份:Sink和Source。Sink指代的是数据的接收端,Source指代的是数据的发送端即数据源。MCP协议基于gRPC双向流协议进行定义,Sink端和Source端都可以随时往对端发送数据,相互不会阻塞。从上图的协议交互也可以看出,Sink端可以主动发送RequestResources请求来向Source端要求数据,同时Source端也可以主动将Resources数据发送给Sink端。Sink端在收到数据后会返回一个ACK确认。在RequestResources请求和ACK响应中,主要有两个字段:
- collection:表示此次请求需要的数据类型,目前Istio定义了17种类型(测试得出,实际数据以Istio官方说法为准),其中包含了serviceentries作为服务发现的数据等。
- nonce:类似于请求的ID,用来与响应或者请求进行匹配。
而在返回的数据中,还有一个字段就是resources字段,里面包含真正的数据,具体的数据格式和collection的类型有关。
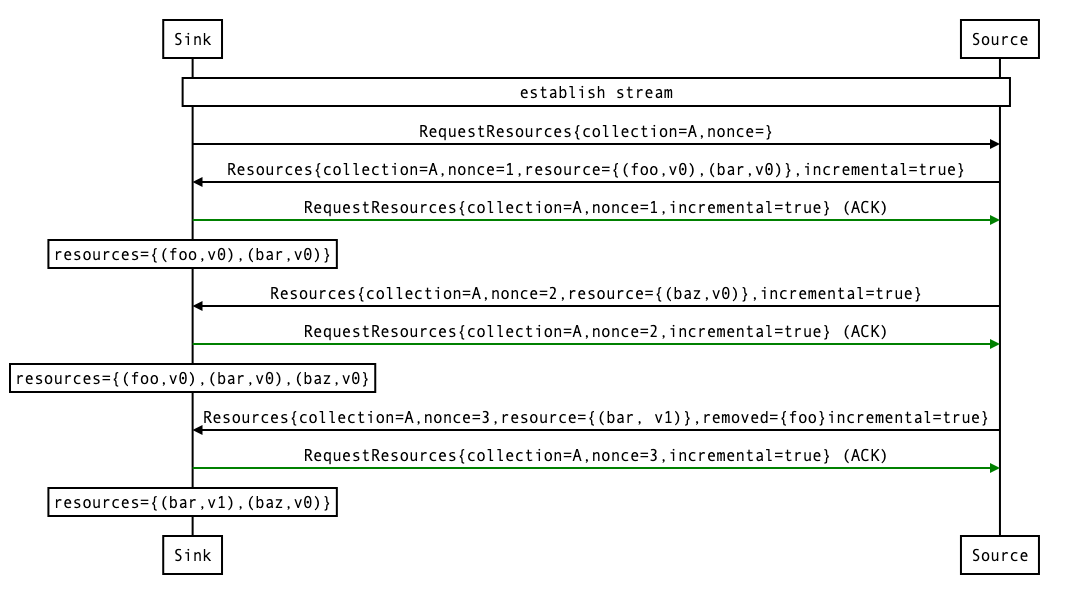
同时MCP协议还定义了增量推送的能力,如下图所示。可以在RequestResouces请求中增加incremental=true字段,这样Sink在收到数据后,会根据增量的形式进行数据的更新。协议的文档中还指出,必须在RequestResouces请求中包含incremental=true的情况下,才能返回给Sink增量的数据,否则Sink端对于该数据的处理将是未知的。目前社区的Pilot还没有支持增量的MCP数据推送,从下一节的源码分析中可以看到,Pilot对于每一个Source(Pilot可以配置多个Source,每个Source之间的数据是隔离的)发送的数据,都是整体替换更新的。目前社区的一个进展是正在进行serviceentries类型数据的增量更新的支持,而且是endpoints粒度的增量更新[3]。
Pilot在启动的时候,会根据ConfigMap里的配置,进行MCP Server的初始化。主要的逻辑可以参考下图:
# 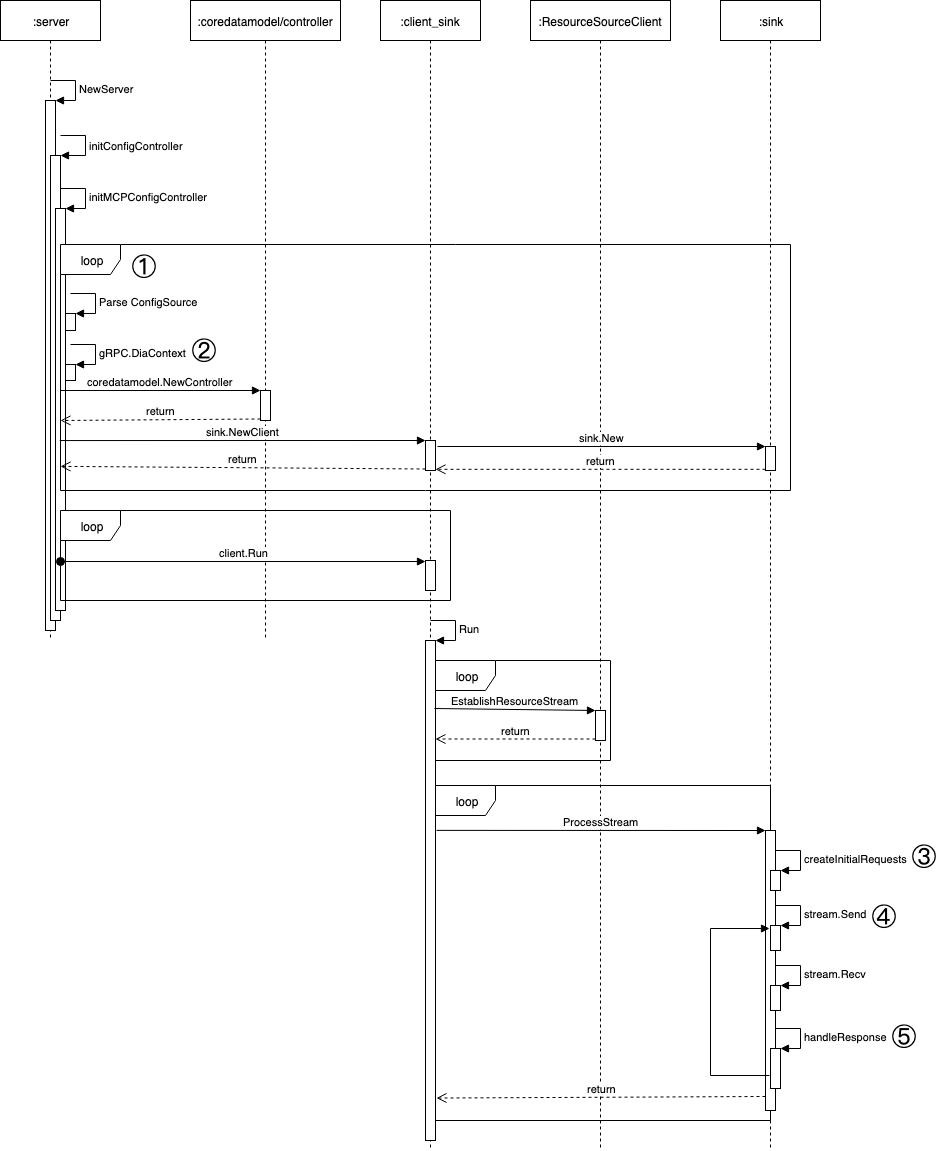 Pilot启动时,会调用server.NewServer来新建Pilot Server。在此过程中,会去读取ConfigSource配置里面的address。由于可能会配置多个address,那么Pilot在这里会循环去创建多个Sink客户端①,每一个Sink客户端拥有独立的数据。在这里有一点要注意的是,这个循环中会尝试与每个MCP Server建立gRPC连接,而如果其中一个MCP Server连接不上的话,整个循环就会推出,并返回error。也就是说如果Pilot在启动过程中无法连上每一个MCP Server,那么Pilot就会处于不健康状态,而在运行时没有这个限制②。当Sink客户端都新建完以后,就会再次循环异步调用每个Sink客户端的run方法,进行数据的收发了。Sink端的run方法主要是调用EstablishResouceStream方法来建立双向流连接。在连接建立后,会调用creatIntialRquests请求来创建一次初始请求③,也就是说Pilot不会在启动时阻塞的去从每个MCP Server拉取数据,更新完后再提供服务,而是异步的进行数据的请求。事实上,Pilot也只会主动发这一次数据的请求④,接下来的数据更新都依赖于MCP Server的主动推送。在收到数据后,则进行handleResponse方法进行数据的更新⑤。
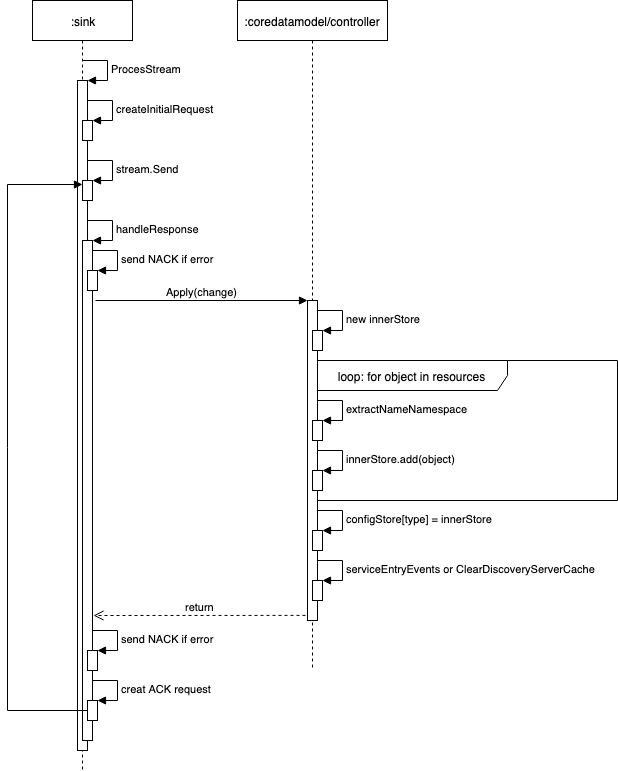
# Pilot Sink端处理流程下面介绍的是Pilot的Sink端在接收到数据的处理逻辑。从下图中可以看出,在接收到数据后,会先判断是否返回了错误,如果返回错误则直接结束数据的更新。如果没有错误,则进入Apply(change)方法。在这个方法中,会先新建一个innerStore的Map来保存更新到的数据。然后会将原来的configStore里对应collection类型的数据直接由这个innerStore进行替换。因此可以看出Pilot目前还不支持增量的MCP数据推送。在更新完数据后,则调用serviceEntryEvents或者ClearDiscoveryServerCache来通知Envoy等组件进行数据的更新。
整体来看目前Pilot MCP协议还处于快速的更新和迭代阶段,未来可能还会有很多的变化。但是Istio基于MCP协议进行重构的大方向应该是不会跑了。Nacos团队目前也在密切关注着Istio及其他云原生组件的发展方向,同时将会陆续发布相关的功能,敬请期待。
[1] Pilot重构设计文档 https://docs.google.com/document/d/1S5ygkxR1alNI8cWGG4O4iV8zp8dA6Oc23zQCvFxr83U/edit#
[2] MCP协议介绍 https://github.com/istio/api/tree/master/mcp
[3] Pilot serviceentries增量推送的PR https://github.com/istio/istio/pull/12276
[4] Nacos提供的独立的MCP Server,Go语言开发 https://github.com/nacos-group/nacos-istio
[5] Nacos对接Istio的issue,以及相关的commits https://github.com/alibaba/nacos/issues/1409